[UOD2022] IKRig的应用价值 - 详细笔记
视频信息
- 标题:
[UOD2022]IKRig的应用价值 | Epic 戴浩军- 时长:
35 分 13 秒- 来源:Bilibili / 虚幻引擎官方
- 主题:围绕 UE5 的
IK Rig、IK Retargeting、动画蓝图(Anim Blueprint)中的 IK Rig 节点、以及IK Rig Blueprint Component的组合应用
一、这场分享在讲什么
这场分享的核心,不是单纯介绍一个新工具,而是想说明 IK Rig 在 UE5 里已经从“一个做绑定或重定向的小功能”,变成了一个可以同时服务于以下几个方向的中枢工具:
- 动画重定向:让不同骨架、不同身材比例的角色共享动作。
- 实时 IK 解算:在运行时对脚落地、手部对齐、身体姿态进行动态修正。
- 动画蓝图集成:把 IK Rig 求解能力嵌到已有动画流程里。
- 蓝图组件化:把 IK Rig 的目标与求解逻辑暴露给关卡、角色蓝图和玩法系统使用。
演讲的意图很明确:把 IK Rig 从“编辑器里的一个资产”提升为“项目动画技术栈的一部分”来看待。
二、目录与整体结构
演讲开头给出的目录非常清晰,基本就是这次分享的结构骨架。

图注:目录页说明本次分享分成 6 个部分,顺序是 IK Rig 概述、IK 重定向、动画蓝图 IK Rig 节点、IK Rig 蓝图组件、典型应用案例、常见问题答疑。
根据目录和画面内容,这次分享大致可以理解为三层:
- 先解释
IK Rig是什么、为什么值得用。 - 再说明它如何和
Retarget、动画蓝图(Anim Blueprint)、IK Rig Blueprint Component串起来。 - 最后给出案例与经验,强调项目落地价值。
三、IK Rig 概述
1. IK Rig 解决的核心问题
传统动画流程里,角色动作经常有三个常见痛点:
- 不同角色骨架不一样,动作复用成本高。
- 动作资源是离线烘焙的,到了运行时很难根据地形、交互目标、角色体型做修正。
- 单一 Two Bone IK 或局部 IK 节点能解决局部问题,但很难形成可复用、可扩展的系统。
IK Rig 的价值就在于:
- 它把骨骼链、IK 目标、求解器、预览调试放进了一个统一资产里。
- 它天然适合和
IK Retargeter配合,解决跨角色动作复用。 - 它又能进入动画蓝图与蓝图组件,承担运行时修正任务。
换句话说,IK Rig 同时覆盖了“离线准备”和“运行时应用”两条链路。
2. IK Rig 编辑器里有哪些关键组成
从演讲中的 UE 编辑器界面可以看到,IK Rig 编辑器的核心关注点主要有:
- 骨骼层级 / 骨骼链定义
- IK Goals
- Solver Stack
- Preview Scene
- Bone Settings / Goal Settings
其中最值得注意的是 Solver Stack,因为它决定了你到底怎样解算角色姿态。
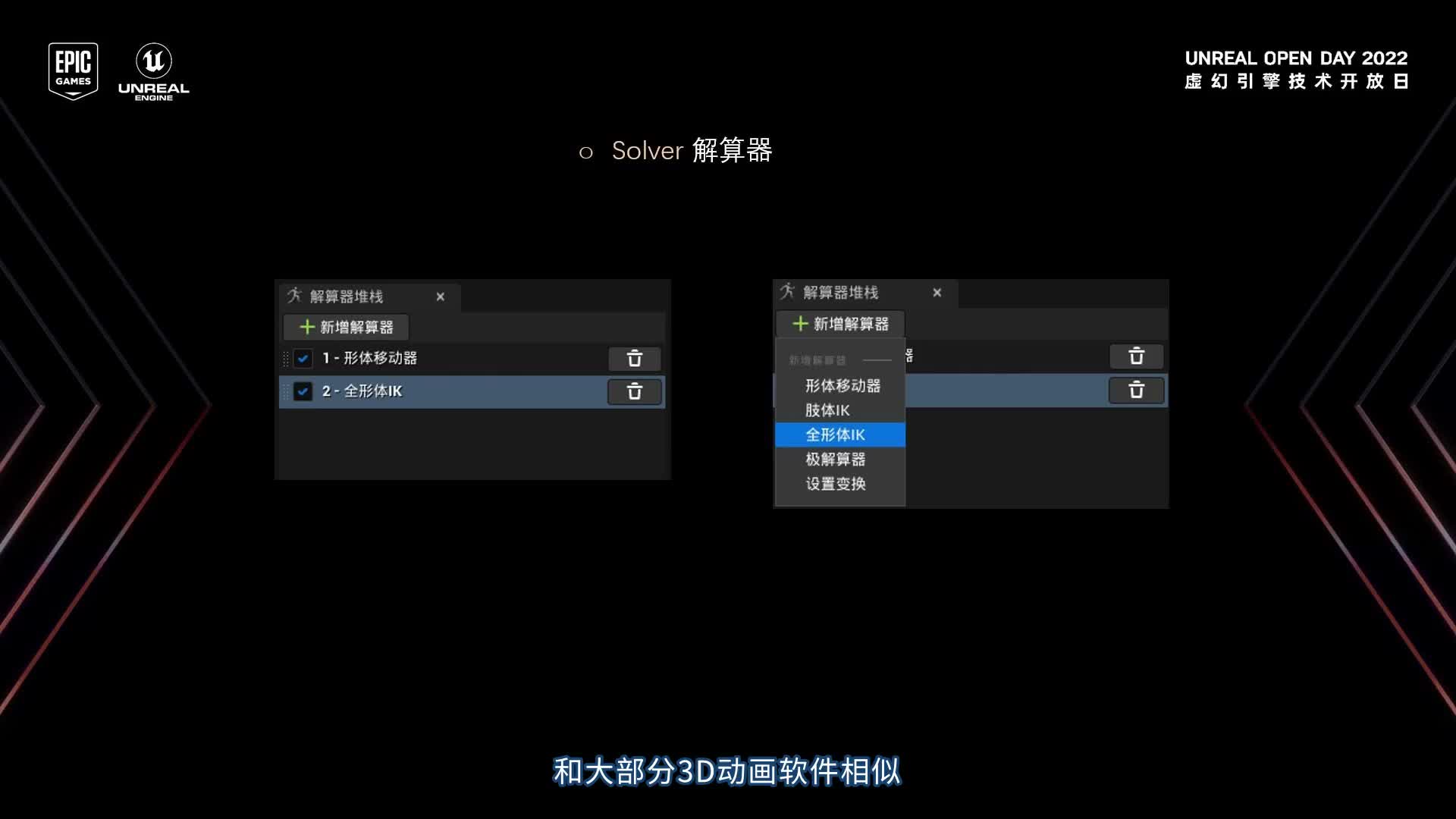
图注:这一页展示了 IK Rig 编辑器中的 Solver Stack。可以看到求解器堆栈支持新增不同类型求解器,例如 Set Transform、Limb IK、Full Body IK 等,说明 IK Rig 不是单一算法,而是可组合的求解流程。
3. IK Rig 资产本身的一个关键特性
视频里有一个很重要、但很容易被忽略的点:IK Rig 资产并不像 Animation Sequence、动画蓝图(动画蓝图(Anim Blueprint)那样强依赖某个固定的 Skeleton 资产。它更像是从当前预览骨骼网格体中读取骨骼结构,再把链、Goal 和 Solver 的配置保存下来。
这意味着:
- 创建 IK Rig 时需要选择一个预览骨骼网格体。
- 打开 IK Rig 之后,可以替换预览骨骼网格体。
- 如果当前还没有建立会受骨骼结构影响的配置,替换后骨骼层级可以随之更新。
- 如果已经建立了不兼容的链、Goal 或 Solver 配置,替换成结构差异过大的骨骼网格体时就会报错。
这也是为什么讲者会强调:IK Rig 更像“骨骼链与求解逻辑的资产”,而不是“绑定死在某个角色上的动画资产”。
4. 编辑器各区域的职责
结合视频内容,IK Rig 编辑器可以拆成以下几块来理解:
Hierarchy / Skeleton:列出骨骼层级,负责创建 Goal、链和进行骨骼相关操作。Solver Stack:创建并排序不同类型的 Solver。Viewport:预览角色姿态和实时调参效果。Timeline:播放预览动画,观察运行时效果。Details:查看 Goal、Solver、骨骼设置等详细参数。Preview Animation:选择用来预览的动画序列、姿态资产等。Retarget Chains:创建和查看重定向用链条。
如果从工作流角度概括,整个编辑器其实围绕四件事组织:骨骼层级、IK Goal、Solver、预览调试。
5. IK Rig 的核心概念
视频里专门回顾了几个 IK Rig 核心概念,实际项目里也非常重要:
Solver Root:解算器的起始根骨骼,所有 IK Solver 都需要。IK Goal:可以理解为末端控制器,用来指定目标位置和目标旋转。Connect / Disconnect Goal to Solver:Goal 和 Solver 不是硬绑定关系,可以随时重连或断开。Retarget Root:重定向时使用的根骨骼,通常会选角色中心骨骼,例如骨盆。Retarget Chain:用于重定向的骨骼链,例如手臂、腿、躯干、颈部、头部。
这几个概念的职责可以简单记成:
IK Goal负责“目标在哪里”Solver负责“怎么解”Retarget Chain负责“重定向时怎么对应”
6. Solver Stack 的意义
从界面文字和演示内容能确定,演讲明确强调了 Solver Stack 的概念。它的重要性在于:
- 一个 IK Rig 里不一定只有一个求解器。
- 求解器可以按顺序堆叠,不同阶段处理不同约束。
- 同一个角色的不同需求,可以采用不同类型的 Solver 来组合。
这比传统“某条腿加个 Two Bone IK 节点”更系统,因为你开始从求解链设计角度思考动画,而不是从“临时补一个节点”角度思考。
7. IK Rig 当前可用的 Solver 类型
视频里点名提到了几类 Solver,它们的职责其实差异很大:
Body Mover:让根骨骼或整体身体跟随相关 Goal 发生调整,适合让局部 IK 影响反馈到全身。Limb IK:适合单条骨骼链,例如单条手臂或腿,通常需要至少三根骨骼。Full Body IK:最完整的全身 IK 解算器,支持多个 Goal,也支持Limits、Stiffness、Preferred Angles等骨骼设置。Pole Solver:更偏向控制骨骼链压缩、弯折时的关节朝向,通常和其他 Solver 组合使用。Set Transform:严格来说不属于 IK Solver,而是通过 Goal 直接控制骨骼的变换,常用于辅助控制。
这段内容非常重要,因为它说明 IK Rig 的能力不只是“有一个全身 IK”,而是可以根据角色和问题类型选不同的 Solver 组合。
四、IK 重定向:IK Rig 为什么对动作复用很关键
1. 重定向不只是骨骼映射
演讲里反复强调 IK Rig 和 IK Retargeting 的结合价值。核心思想是:
- 重定向不只是把 A 骨架的骨头名字映射到 B 骨架。
- 真正难的是:角色比例不同、腿长不同、手臂长度不同、脊柱弯曲程度不同,动作落地后会不会失真。
IK Rig + IK Retargeter能通过骨骼链、IK 目标和求解逻辑,让动作迁移更稳定。
也就是说,UE5 的重定向思路更偏“基于链与解算的重定向”,而不是简单的骨骼一对一复制。
2. 重定向流程可以抽象为四步
结合演讲主题和 UE 官方文档,这部分流程可以整理成:
- 为源角色与目标角色分别建立
IK Rig。 - 在
IK Rig中定义骨骼链和必要的 IK Goals。 - 建立
IK Retargeter,配置链映射、Retarget Pose 和相关参数。 - 预览并调节角色体态、脚部接地、手部位置等关键结果。
这套流程的好处是:
- 角色体型差异更容易控制。
- 复用动作更稳定。
- 后续还可以把这套结果延伸到运行时应用,而不是只停留在离线烘焙。
3. IK Retargeter 编辑器里真正重要的内容
视频里对 IK Retargeter 的编辑器结构和概念也讲得比较细,核心包括:
Retarget Pose:源和目标角色用于重定向的初始姿态;两者越接近,重定向越准确。Chain Mapping:源重定向链和目标重定向链的对应关系,是整套重定向的核心。FK模式:把源链中各骨骼的变换数据传给目标链对应骨骼。IK模式:把源链中 IK Goal 的位移与旋转信息传给目标链,再通过 IK 解算影响最终姿态。Export Selected Animations:把当前预览的重定向结果直接导出成新动画资产。
从讲者的描述能看出,UE5 的 IK 重定向不是一个“黑盒转换器”,而是一个可预览、可编辑、可校正的流程。
4. 动画资产批量重定向的项目流程
视频里讲了一个非常实际的用法:项目中如果有一套源动画库,需要适配多个目标角色,可以:
- 为源角色和每个目标角色各自建立
IK Rig - 基于源 IK Rig 分别创建多个
IK Retargeter - 每个
IK Retargeter指向不同目标 IK Rig - 在内容浏览器中选中一批动画资产,用批量重定向工具导出新的目标动画资产
这个流程的价值在于:
- 可以先直观预览不同目标角色上的重定向效果
- 发现问题后马上改
Retarget Pose、链设置和 Goal 参数 - 调整到满意后再正式导出
也就是说,它不仅是“批处理工具”,也是“结果校正工具”。
5. 项目中的直接收益
如果项目里有下面这些情况,IK 重定向价值会非常高:
- 一个动作库要给很多 NPC 共用。
- 主角、敌人、伙伴共用基础 locomotion,但身材不同。
- 外部动作资源导入后,想快速接到自定义角色。
- 需要把
Manny/Quinn、MetaHuman、第三方角色资产统一接入项目。
本质收益就是两个字:复用。而复用带来的,是动画生产成本下降和整体迭代速度提升。
五、多个求解器:IK Rig 的一个关键能力
演讲中间有一段内容明确出现了 1.2 Multiple Solvers。
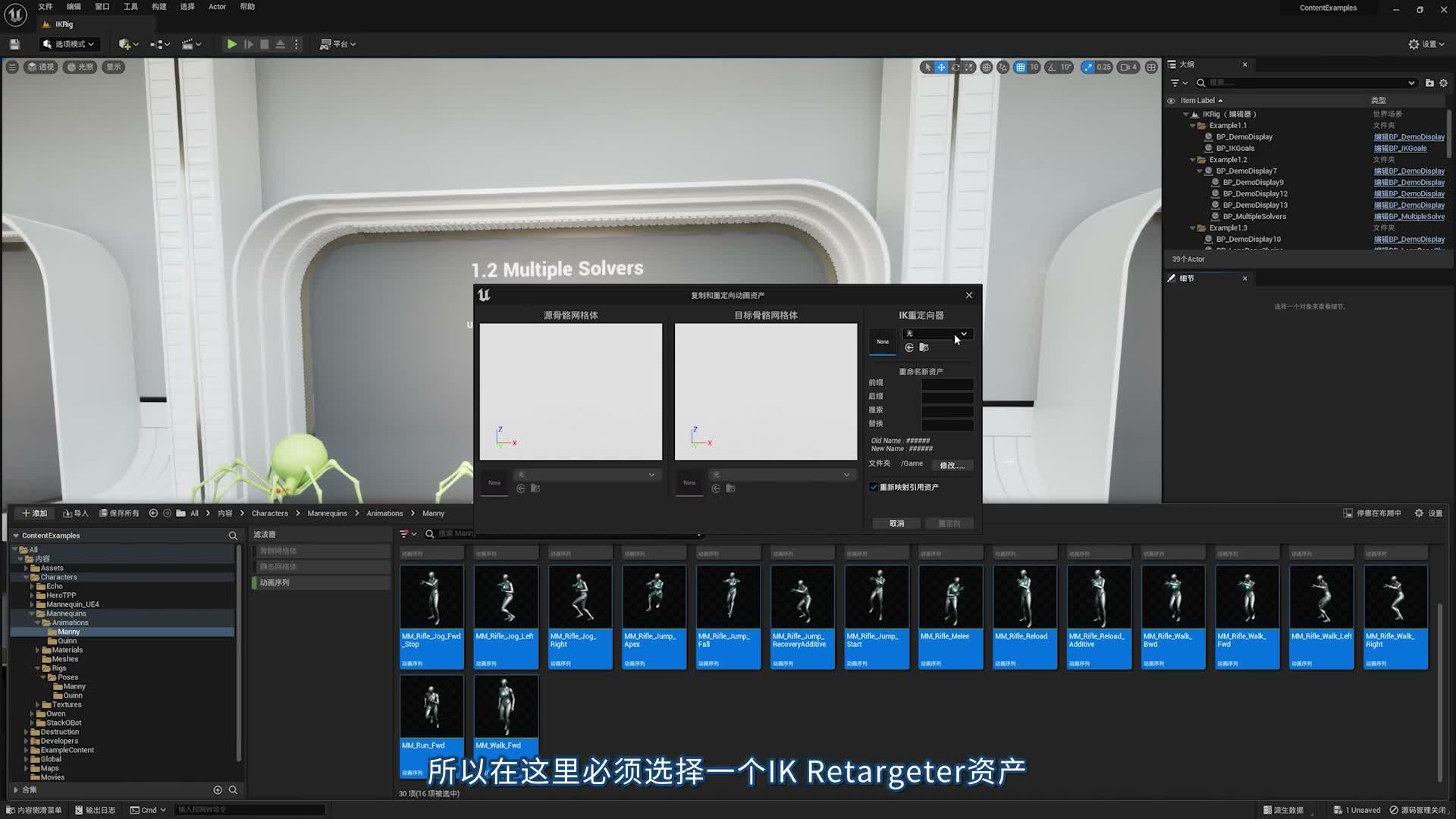
图注:这张图对应 Multiple Solvers 示例。演示重点是:一个 IK Rig 中可以并存多个不同类型的求解器,而不是只能选择一种全局解法。
1. 为什么需要多个 Solver
因为一个角色的问题往往不是同一种约束:
- 手臂可能更适合
Limb IK - 整体身体协调更适合
Full Body IK - 某些辅助控制又可能只需要简单的
Set Transform
如果所有问题都用单一解法处理,就会出现两类问题:
- 解算过重:小问题也用复杂全身解算,成本和调试复杂度都高。
- 解算不足:复杂姿态却只用局部 IK,最后身体关系不自然。
2. 这部分想传递的工程观念
这一段真正重要的,不只是“UE 支持多个 Solver”,而是它体现出一种更工程化的思路:
- 先拆解问题,再选择 Solver。
- 把不同类型的约束交给最适合的解法。
- 通过堆栈顺序控制最终姿态。
这对团队很重要,因为它意味着 IK Rig 可以被设计成一套可调优、可扩展、可复用的技术资产,而不是一次性配置。
六、Long Bone Chains:复杂骨骼链的处理思路
后续画面中出现了 1.3 Long Bone Chains。从语义和案例环境来看,这一段主要在说明:当骨骼链更长、更复杂时,IKRig 仍然有配置和求解价值。

图注:这一页对应 Long Bone Chains 演示。画面重点是说明在更长、更复杂的骨骼链上,IKRig 仍能通过链定义和求解器配置维持可控的解算结果。
1. 这类场景为什么难
长骨链通常意味着:
- 骨骼层级更深
- 末端变化会传递到更多中间骨骼
- 小误差会被放大
- 姿态稳定性、扭转、拉伸感更难控制
典型例子可能包括:
- 动物脊柱或长尾巴
- 特殊比例角色
- 机械臂、触手、夸张风格角色
2. 演讲对这部分的启发
这段内容其实在提醒开发者:不要把 IK Rig 只理解成人形双足角色工具。它更像一个通用的骨骼链求解平台,只要你的问题能抽象成“链 + 目标 + 约束 + 求解”,它就有应用空间。
七、动画蓝图中的 IK Rig 节点
1. 为什么要进 动画蓝图(Anim Blueprint)
如果说 IK Retargeting 更偏内容生产和资源复用,那么 动画蓝图(Anim Blueprint) 里的 IK Rig 节点就更偏运行时。它的价值主要在于:
- 让动画结果在运行时再修正一层。
- 把环境信息、交互目标、角色状态喂给 IK 求解。
- 与状态机、蒙太奇、姿态缓存等现有动画体系融合。
2. 适合放进动画蓝图的典型场景
这类节点通常适合处理:
- 脚底贴地与台阶适配
- 手部去抓住动态目标
- 瞄准、扶墙、摸门把手
- 武器持握姿态修正
- 已播放动画和实时目标之间的对齐
3. 在动画蓝图里使用 IK Rig 的几个关键细节
视频里讲得比较细的一点是:把 IK Rig 放进动画蓝图时,不只是“插一个节点”这么简单。
IK Rig节点一般要放在其他动画结果之后,这样最终姿态才是在已有动画基础上做修正。- 如果希望在动画蓝图里直接改某个 Goal 的位移或旋转,需要在 IK Rig 编辑器中勾选该 Goal 的
Expose Position和Expose Rotation。 - Goal 的输入不一定只是手动数值,还可以跟随某根具体骨骼,或者根据不同空间类型来解释输入,例如组件空间、世界空间绝对值或增量。
这意味着:IK Rig 进入动画蓝图后,实际上变成了一个可实时编程、可接环境数据的修正层。
4. 这部分的重点不是“替换动画蓝图”
演讲的方向更像是在说:
IK Rig不是取代动画蓝图。- 它是动画蓝图中的一个高价值能力块。
- 动画蓝图仍然负责状态切换、姿态混合、播放控制;IKRig 负责更智能的姿态修正。
这是一种很典型的 UE 工作方式:把复杂系统拆成多个职责清晰的层。
八、IK Rig Blueprint Component:把 IK 从动画系统拉到玩法系统
这部分是整场分享里很有价值、也很容易被忽视的地方。因为一旦引入 IK Rig Blueprint Component,IK 就不再只是动画师或动画蓝图内部的事情,而能被玩法、角色、关卡系统驱动。
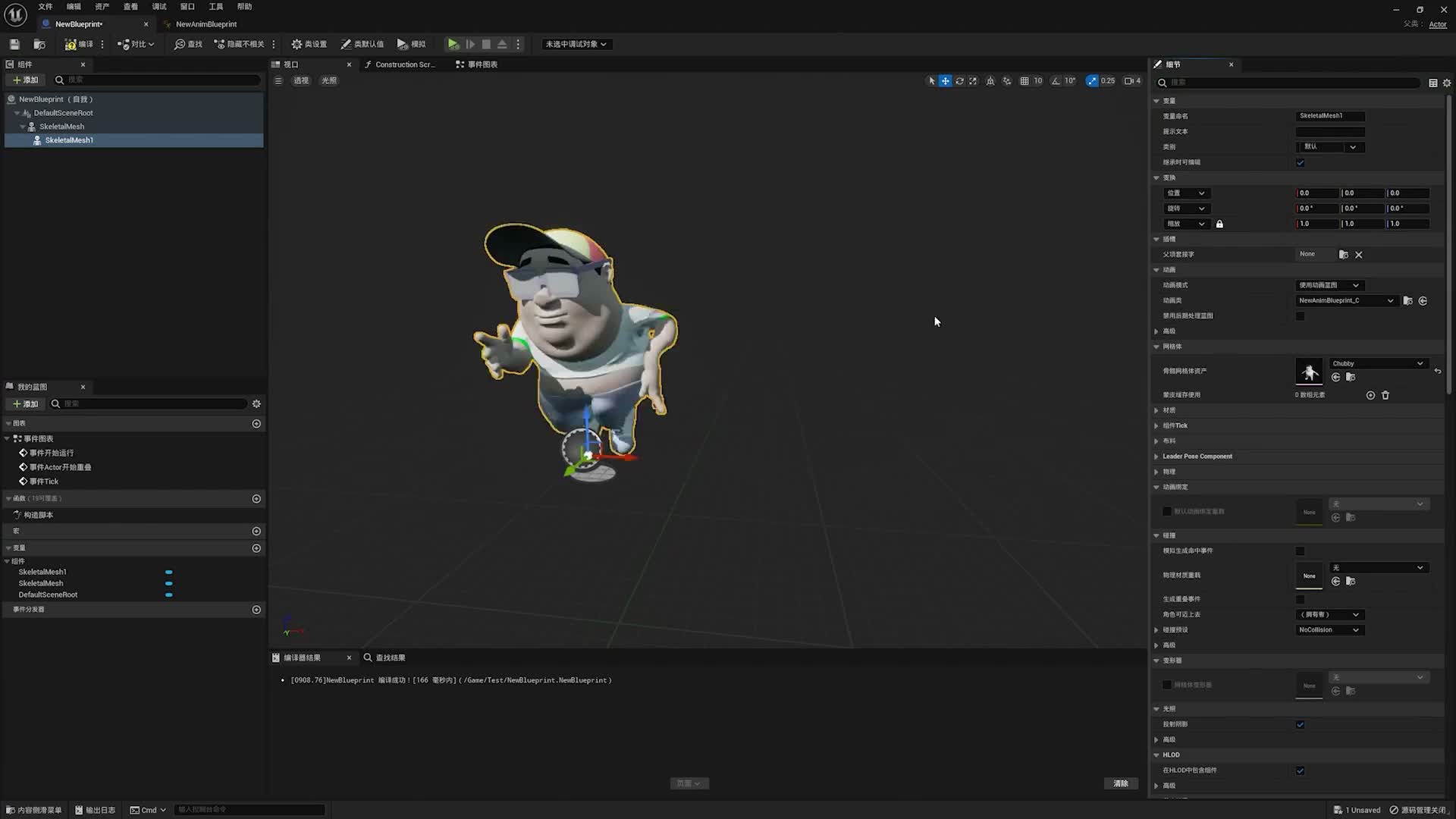
图注:这一段对应 IK Rig Blueprint Component 的运行时接入思路。画面说明 IK Rig 的目标和参数可以被蓝图逻辑驱动,而不是只能在资产里静态配置。
1. 组件化的核心价值
组件化意味着:
- 角色蓝图可以直接控制 IK 目标。
- 可以在蓝图里根据射线检测、交互对象、关卡机关来更新 IK 目标位置。
- 玩法系统和动画系统之间建立直接桥梁。
这会把很多原本“写死在动画里”的东西变成动态逻辑,例如:
- 角色手去按面板按钮
- 手掌自动贴向门或墙
- 脚步实时适配斜坡和不规则地形
- 角色看向或接触场景中的交互点
2. 为什么组件化方式更灵活
视频里对 IK Rig Blueprint Component 的定位其实讲得很清楚:
- 它让角色蓝图可以根据 IK Goal 名称,直接调用函数修改 Goal 属性。
- 这样就不需要在角色蓝图里频繁 Cast 动画蓝图,也不需要把一堆变量先桥接到动画蓝图里再传给 IK 节点。
- 动画蓝图和角色蓝图之间的耦合会更低。
- 同一个组件还可以同时控制蓝图里的多个骨骼网格体组件。
这本质上就是把 IK Rig 从“动画图里的一个节点能力”提升为“角色系统级的可调用能力”。
3. 为什么这很重要
因为现代项目里,动画往往不是孤立的。它要响应:
- 地形
- 物理
- 交互目标
- 网络状态
- 角色装备
- 程序驱动的目标点
IK Rig Blueprint Component 的意义,就是把 IK 能力从“动画资源层”提升到了“系统层”。
4. 实践中的一个好习惯
如果团队要落地这部分能力,建议把蓝图组件的职责控制在“接受外部目标并更新 IK 输入”,而不要在组件里堆太多业务逻辑。这样更容易维护,也方便后续把相同机制复用到不同角色。
九、典型应用案例:这套技术真正能落到哪里
从整场分享的案例导向来看,IKRig 更适合以下几类问题。
1. 跨角色动作复用
这是最直接的一类:
- 把已有动作库迁移到新角色。
- 把模板角色动作重定向到量产 NPC。
- 把商店资源、动作捕捉资源接入项目自定义角色。
适合程度:非常高。
2. 运行时接地与环境适配
典型表现:
- 上楼梯时脚不穿模
- 站在斜坡上身体姿态更自然
- 角色和地形接触关系更稳定
适合程度:高。
3. 交互对齐
例如:
- 手对齐门把手
- 手抓住武器或控制台
- 与场景装置发生带位置要求的互动
适合程度:高。
4. 特殊骨骼链与非标准角色
如果项目里有特殊体型、动物、机械、夸张风格角色,IK Rig 的链与 Solver 设计能力会更有价值。
适合程度:中到高,取决于团队对骨架和求解器的掌控程度。
5. 视频里讲到的四类运行时重定向场景
这是视频里很“项目化”的一段,讲者实际上给出了一套判断框架:
情况一:Skeleton 相同
- 多个骨骼网格体共享同一个 Skeleton
- 可以直接共享动画资产
- 一般不需要额外上 IK 重定向
情况二:Skeleton 不同,但主体骨骼结构和命名相同,末端骨骼不同
- 常见于模块化角色,例如头、身体、衣服、武器拆成多个部件
- 这种情况通常更适合
Copy Pose From Mesh,而不一定需要 IK 重定向 - 如果子部件还需要额外动画或物理,可在自己的动画蓝图中再做按骨骼融合
情况三:Skeleton 不同,主体结构相同但体型不同
- 需要
Retarget Pose From Mesh + IK Retargeter - 如果比例差异不大,可以不配置 IK Goal
- 如果比例差异明显,就需要 IK Goal 来得到更理想的效果
情况四:Skeleton 不同,结构也不同
- 必须使用
IK Retargeter + Retarget Pose From Mesh + IK Goal - 这是最复杂但也最能体现 UE5 IK 重定向价值的情况
这四种情况的意义在于:不是所有“跨角色驱动”都要上同一套方案,应该先判断骨骼资产关系和结构差异,再决定是不是使用 IK 重定向。
十、这场分享透露出的最佳实践
结合演讲内容和 UE 官方文档,可以总结出一套比较稳妥的实践原则。
1. 先设计链,再谈 Solver
很多问题看起来像 Solver 问题,实际上是链划分问题。比如:
- 根骨骼是不是纳入链里
- 手臂链是否切得过长或过短
- Spine 链怎么定义
链定义如果不合理,后面换多少 Solver 都很难得到好结果。
2. 尽量把运行时需求和离线需求分层
建议把:
- 用于重定向的 IKRig
- 用于运行时修正的 IK Rig / AnimBP 逻辑
区分清楚。它们虽然可能共用思路,但目标不完全一致。这样做更容易维护,也更利于定位问题。
3. 不要一开始就全身都上 Full Body IK
Full Body IK 很强,但不一定是所有问题的最优解。小范围问题可以先用更轻、更直接的解法。只有当局部 IK 无法维持整体姿态协调时,再考虑全身求解。
4. 把 IK Rig 当成系统资产,而不是一次性 Demo 资产
一个成熟项目中,IKRig 应该具备:
- 清晰命名
- 统一骨骼链规范
- 可复用的 Goal 命名方式
- 对应的调试流程
- 适配动画蓝图和蓝图组件的接口约定
这样才能避免“示例里能跑,项目里没人敢改”的情况。
十一、常见问题与风险点
演讲最后有 FAQ 环节,虽然视频里未能完整提取全部问题,但结合整个主题,可以把高概率关注点整理为以下几类。
图注:结尾进入 常见问题答疑,说明演讲前面的内容更偏方法和案例,最后会回到实际项目中最容易碰到的落地问题。
1. 为什么效果不稳定
常见原因通常包括:
- 链定义不正确
- Goal 放置不合理
- Solver 选型不合适
- 角色初始姿态差异太大
- 期望由 IK 解决的问题其实是动画源数据问题
2. 为什么重定向后姿态还是怪
通常不是“工具失效”,而是:
- 源角色与目标角色体型差异过大
- 骨骼链映射不够准确
- 根骨、骨盆、脊柱姿态处理不统一
- 预览时看起来可用,运行时又叠加了别的动画修正
3. 为什么项目里不好维护
高频原因是:
- 资产命名混乱
- 不同角色各自做一套,没有统一规范
- 动画蓝图、IKRig、蓝图组件之间接口没有约定
- 运行时谁来更新 IK Goal 不清晰
也就是说,IK Rig 不只是技术问题,还是项目组织问题。
4. IK 重定向和 UE4 位移重定向的本质区别
视频里的 FAQ 专门提到了这一点:
- UE4 的位移重定向方案更偏
FK,对骨骼结构差异大的角色往往效果不理想。 - UE5 的 IK 重定向同时支持
FK + IK。 - 并且可以通过 IK Goal 让脚、手等关键部位在重定向后保持更稳定、更可控的结果。
- 旧方案也不擅长处理结构差异较大的角色之间的实时重定向,而 IK 重定向可以覆盖这种场景。
5. 怎样更容易得到理想的重定向效果
讲者在 FAQ 中给出的经验大致可以归纳为:
- 源角色和目标角色的
Retarget Pose尽量接近 - 根据角色特点合理选择 Solver,例如人体更适合
Full Body IK,一些机械结构更适合Limb IK - 如果使用多个 Solver,要注意执行顺序
- 对脚、手等需要保持稳定位置的关键部位配置 IK Goal
- 在
IK Retargeter中继续针对具体链做参数调优
这几条实际上已经能作为项目里排查重定向问题的优先级列表。
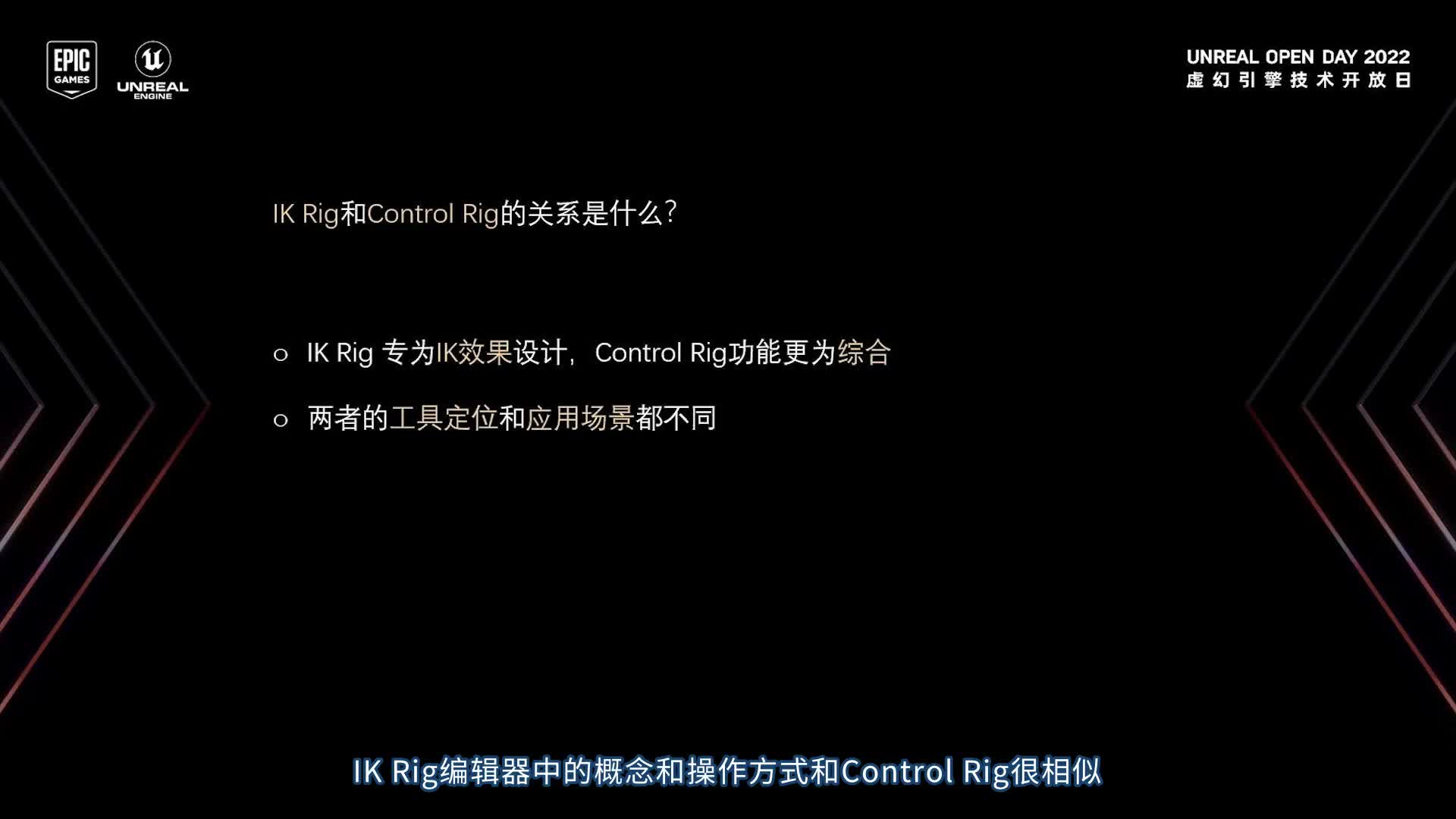
6. IK Rig 和 Control Rig 的关系
讲者最后还回答了一个常见疑问:为什么 IK Rig 的很多概念看起来和 Control Rig 很像?
更准确的理解应该是:
IK Rig更像是一个为 IK 和 Retarget 专门设计的、显化程度更高的绑定方案Control Rig则是更通用、可编排性更强的实时绑定与动画控制方案- 前者更偏专用工具,后者更偏通用动画控制系统
十二、术语表
IK Rig:UE5 中用于定义骨骼链、IK Goal、Solver 并进行预览与调试的资产。IK Goal:IK 的目标点,通常表示末端想去的位置或方向。Solver Root:解算器开始生效的起始骨骼。Retarget Root:用于重定向的根骨骼,通常选角色中心骨骼。Retarget Chain:重定向使用的骨骼链,例如手臂、腿、脊柱、头部。Solver Stack:多个求解器组成的解算堆栈,按顺序处理不同约束。Body Mover:让局部 IK 影响反馈到整体身体位移的 Solver。Limb IK:适合肢体类局部解算的 IK 方法。Full Body IK:考虑整体身体协调关系的求解器。Pole Solver:用于控制骨骼链压缩和弯折方向的辅助求解器。Set Transform:通过 Goal 直接控制骨骼变换的辅助型解算方式。IK Retargeter / IK Retargeting:基于 IK Rig 的动作重定向系统。Retarget Pose From Mesh:动画蓝图中的运行时实时重定向节点。动画蓝图(Anim Blueprint):UE 的动画蓝图系统,负责运行时姿态逻辑。IK Rig Blueprint Component:在蓝图层驱动 IK Rig 目标与求解的组件化方式。Control Rig:更通用、可编排性更强的引擎内实时绑定与动画控制方案。
十三、我对这场分享的总结
如果只用一句话概括,这场分享真正想表达的是:
IK Rig 在 UE5 里不是一个孤立功能,而是一条把“动画复用、运行时修正、蓝图驱动、复杂骨骼链处理”串起来的基础能力。
它最有价值的地方不在于某一个 Demo,而在于它让团队开始用统一方法处理以下问题:
- 动作如何复用
- 姿态如何动态修正
- 玩法如何驱动动画目标
- 特殊角色如何保持可控
对中大型项目来说,这种统一性通常比单点效果更重要。
十四、适合二次消化的复习路线
如果准备真正上手这套内容,建议按下面顺序复习:
- 先理解
IK Rig资产本身,熟悉骨骼链、Goal、Solver。 - 再做
IK Retargeter,把一个动作从模板角色迁到自定义角色。 - 接着在
动画蓝图(Anim Blueprint)里接入 IK Rig 节点,做脚底贴地或手部对齐。 - 最后再尝试
IK Rig Blueprint Component,把玩法目标动态传给 IK 系统。
这样学习会比一上来就做复杂交互更稳。